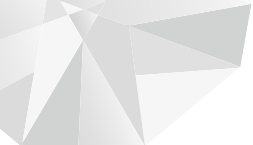

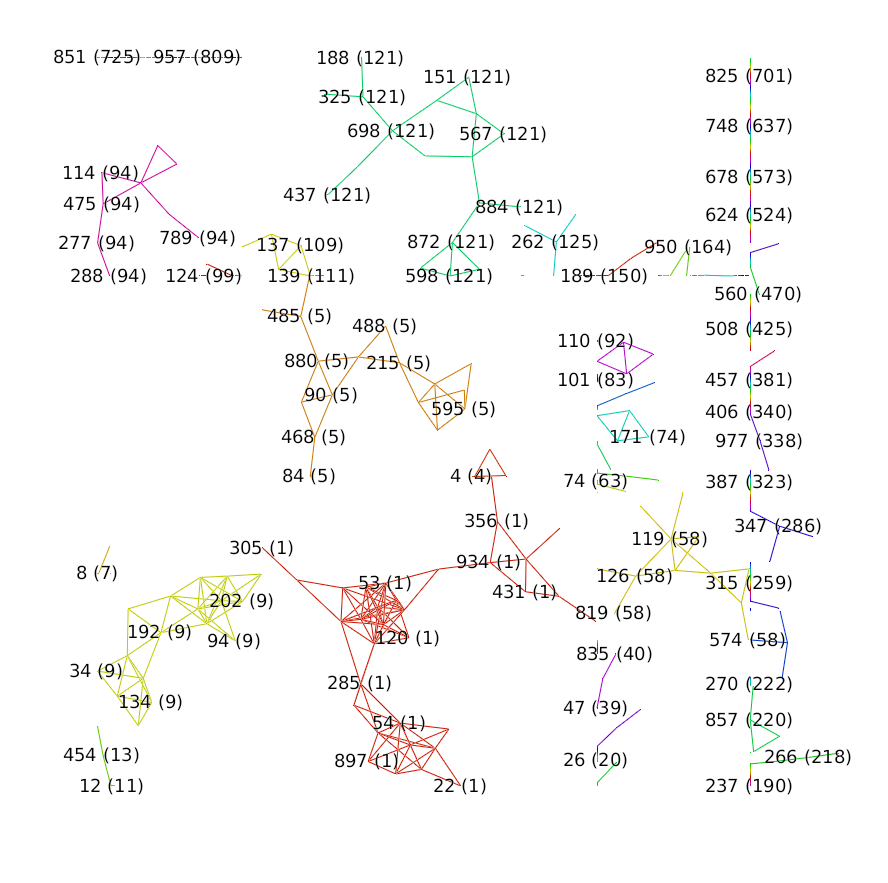
Cloud of "good" temporal association rules
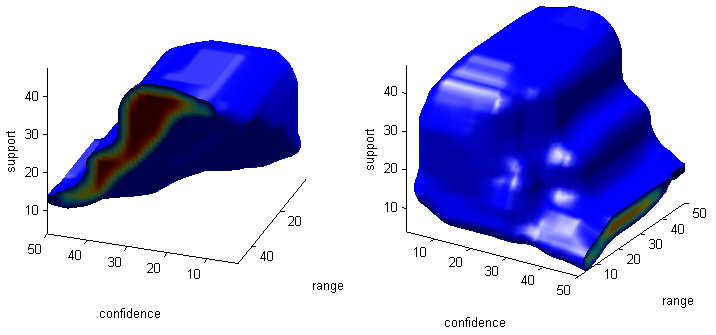
Virtual robot console during unsupervised exploration
A* search algorithm in 3D
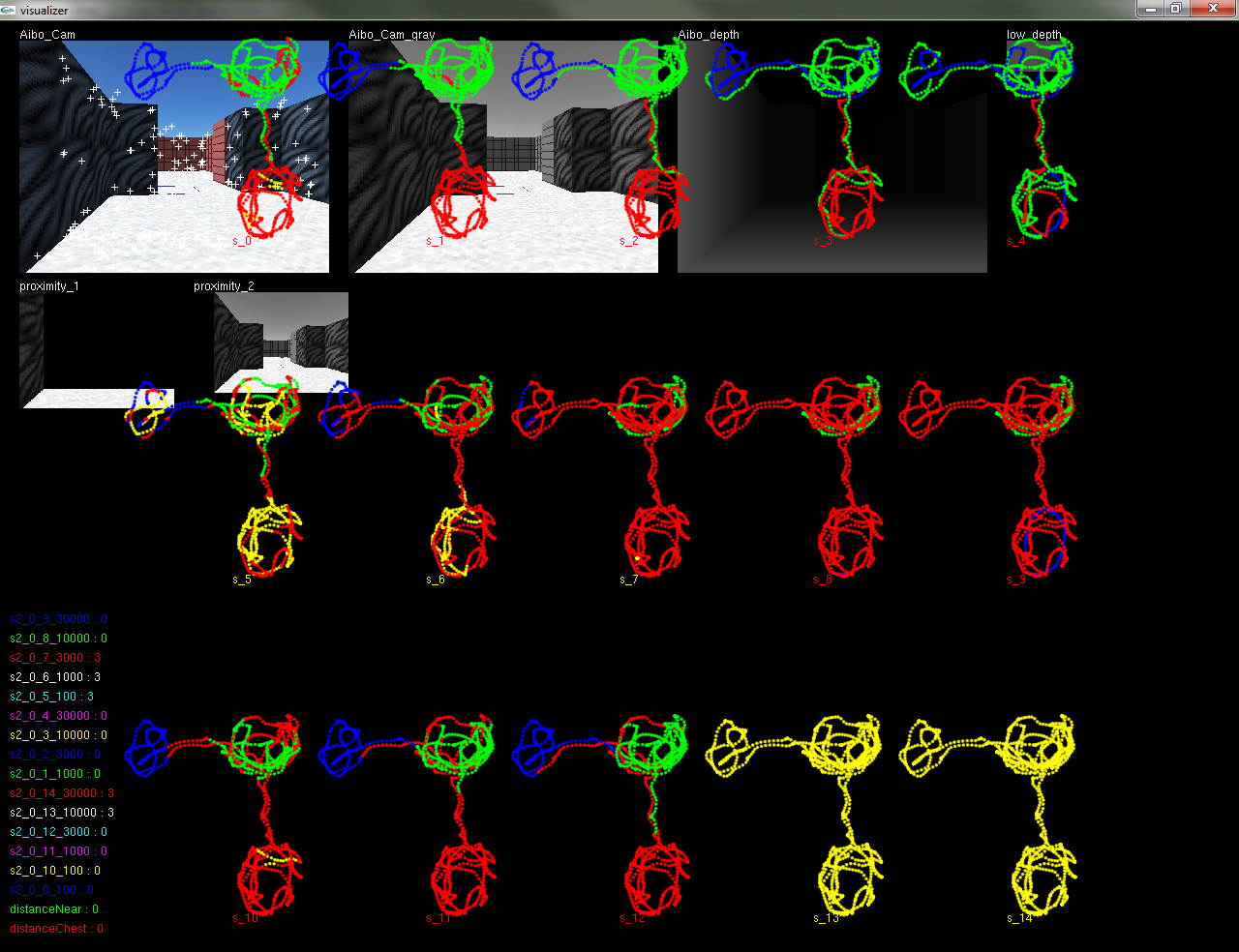
Screen shot of our game called Build & Defend

Chess configurations
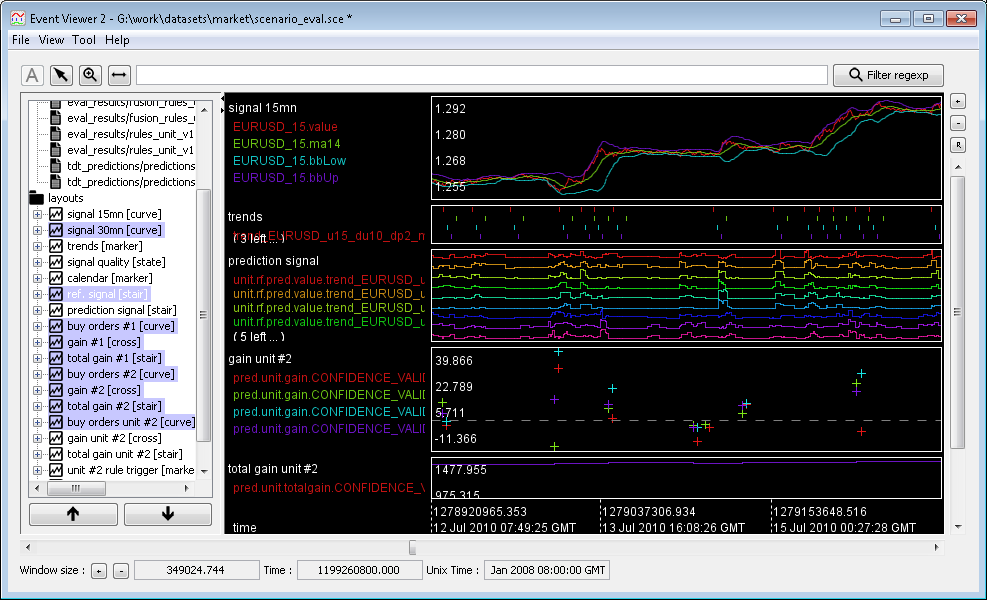
Screen-shot of the Even Viewer software (available in the download section)
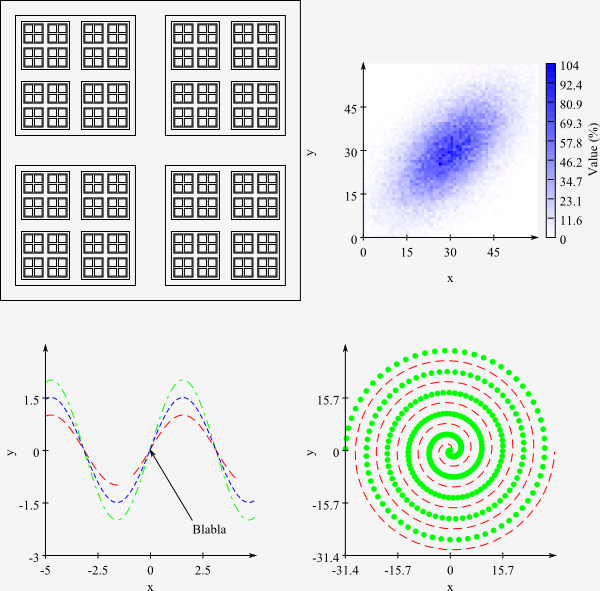
Example of our ploting library
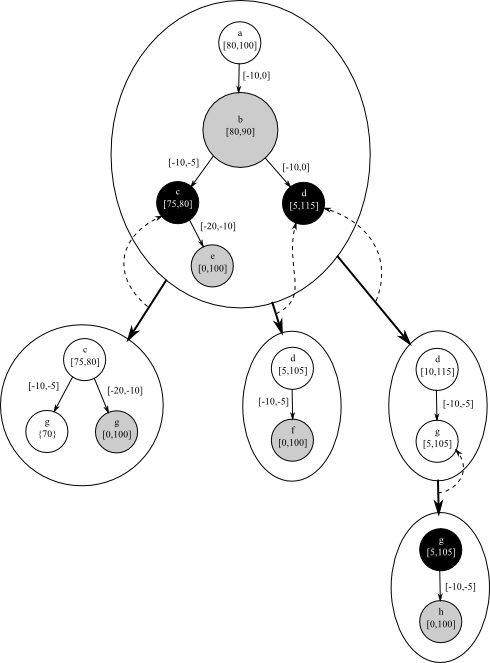
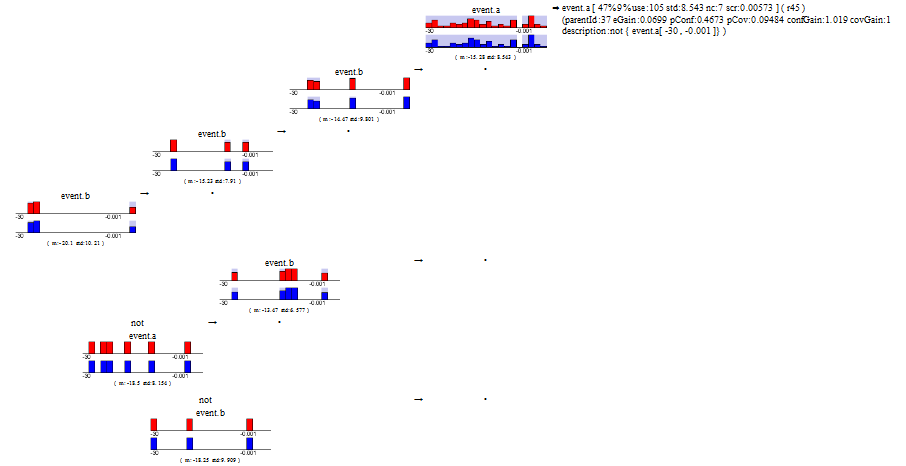
Example of Recursive Titar plan. The main objective is 'a'.
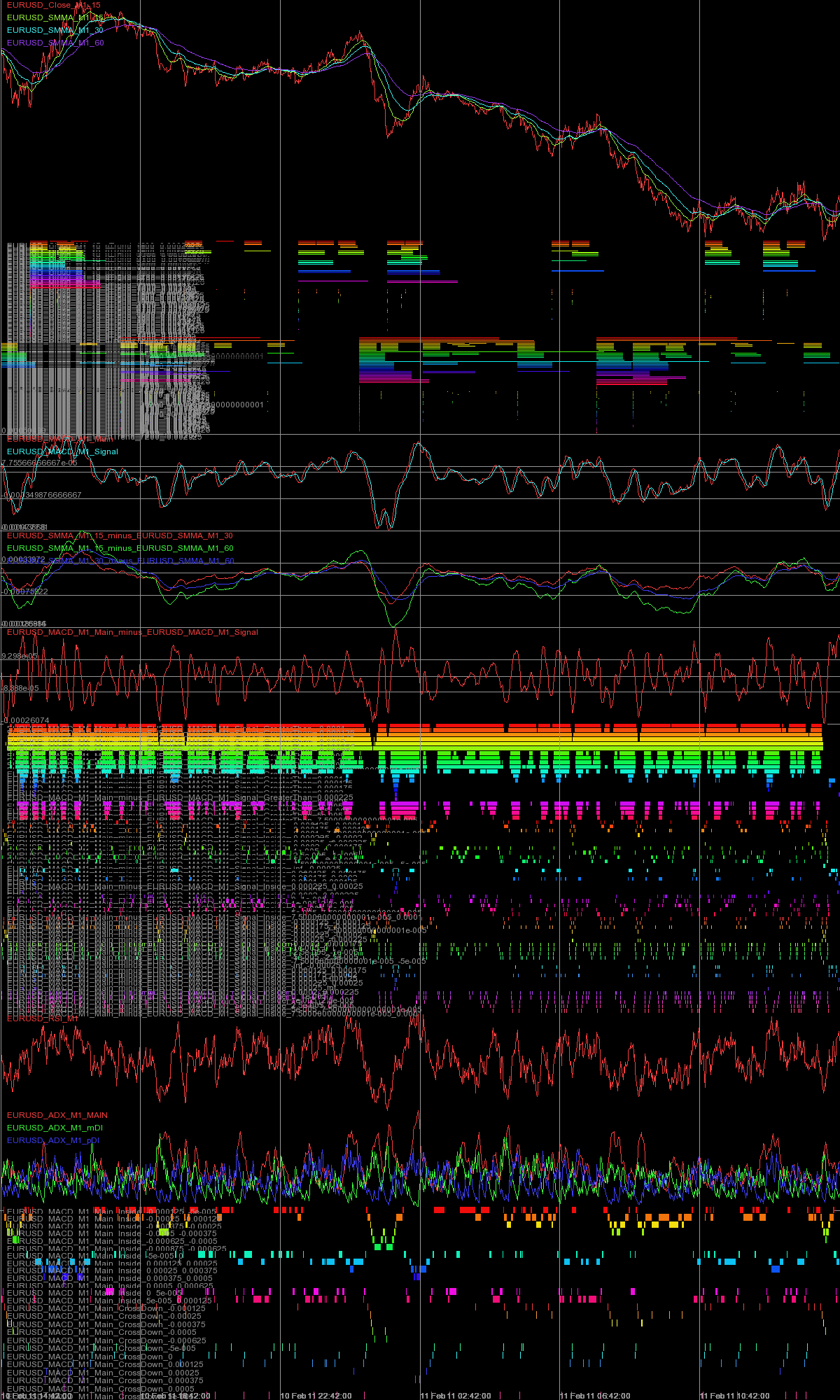
Forex pre-processing console
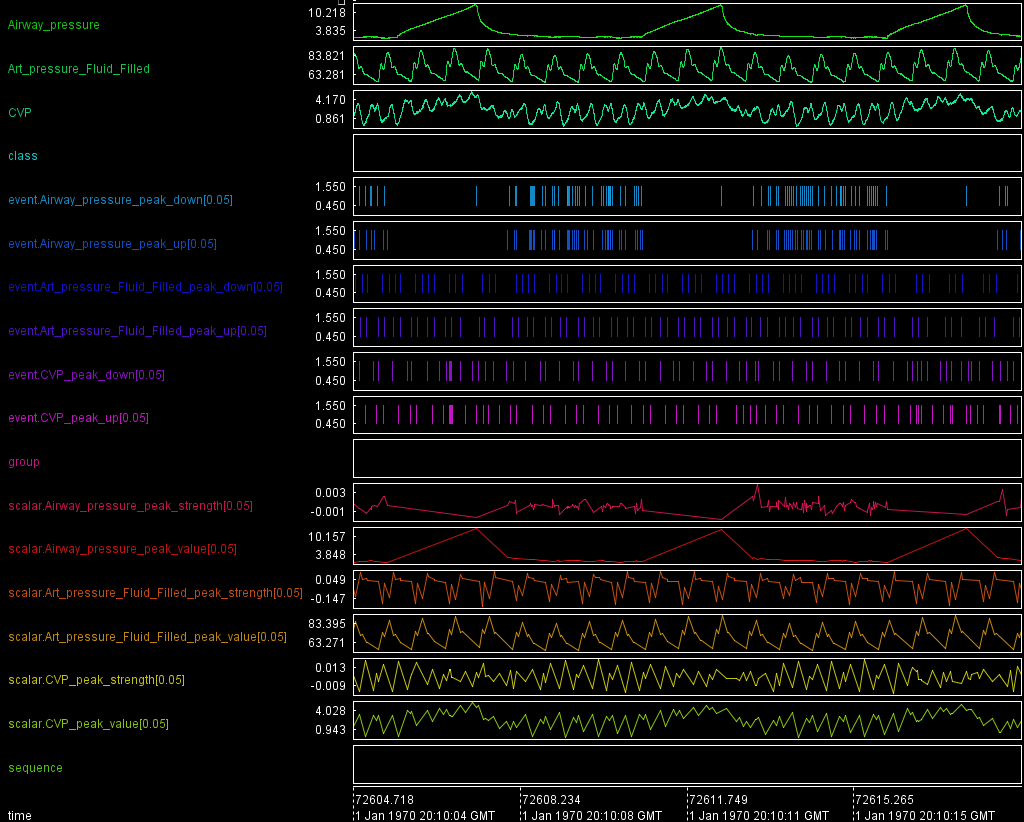
High frequency vital signs + pre-processing before learning forecasting model.
Learning of Tita rules:
Evolution of GSMap over time (video)
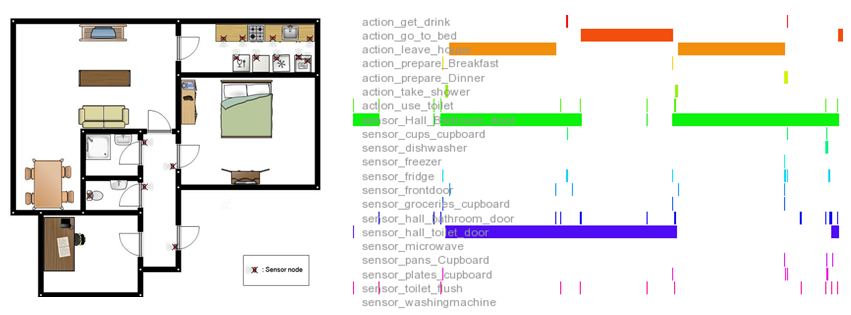
House activity tracking console

Procedurally generated lava animation [video]
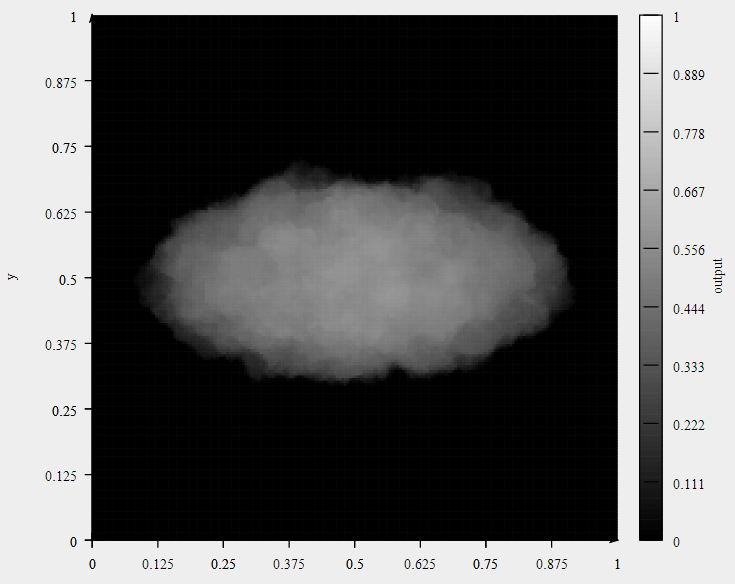
Learning 3d ellipse with AdaBoost

Learning 3d ellipse with decision trees
Learning 3d ellipse with k-nearest neighbor (KNN)

Learning 3d ellipse with Normal Bayes
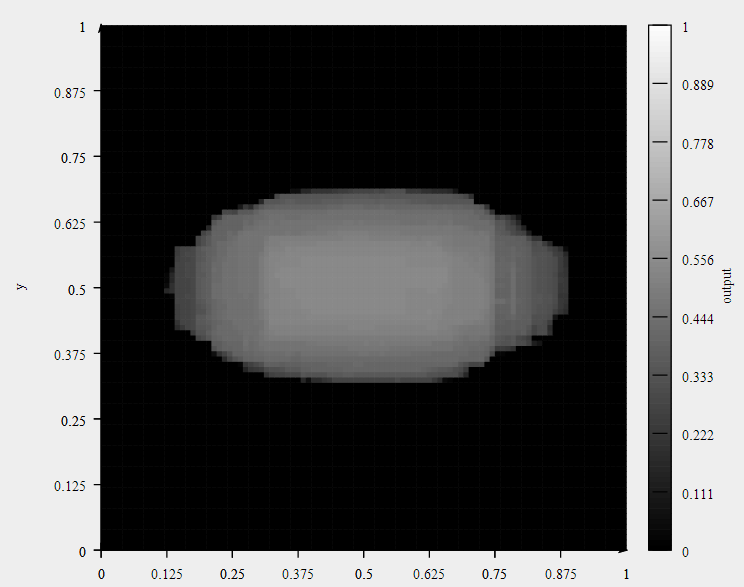
Learning 3d ellipse with KNN
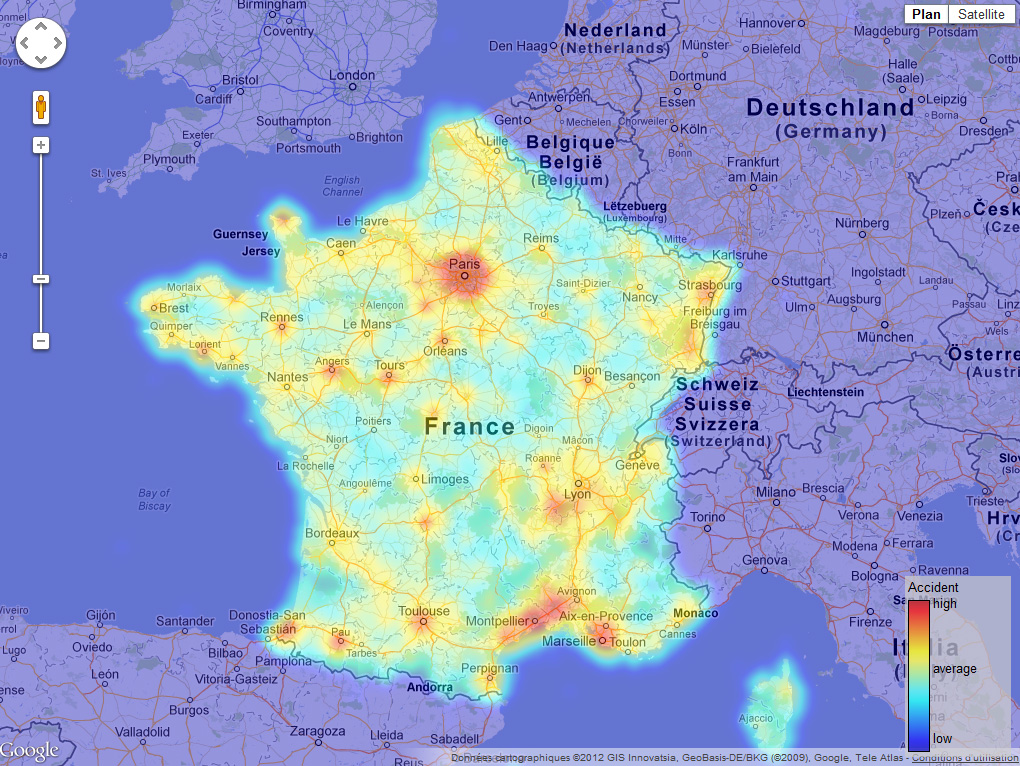
Map of accidents in France
Google map + our Mapping software

Stair mechanic in Build&Defend (video)
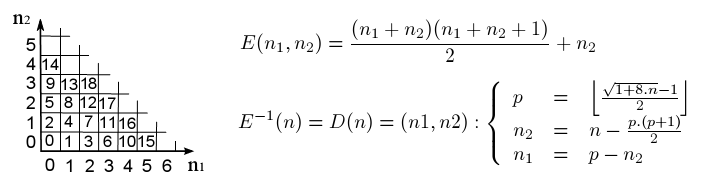
N² to N correspondence
Used to encode 1 order logic terms in neural networks
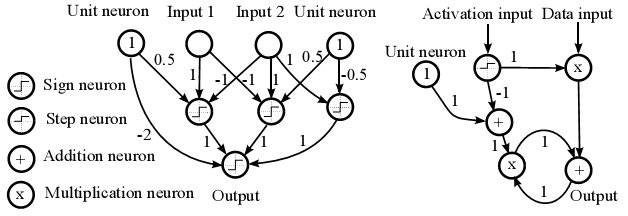
Equality and memory modules with neural networks

Virtual robot in action

Virtual robot in action (close view)
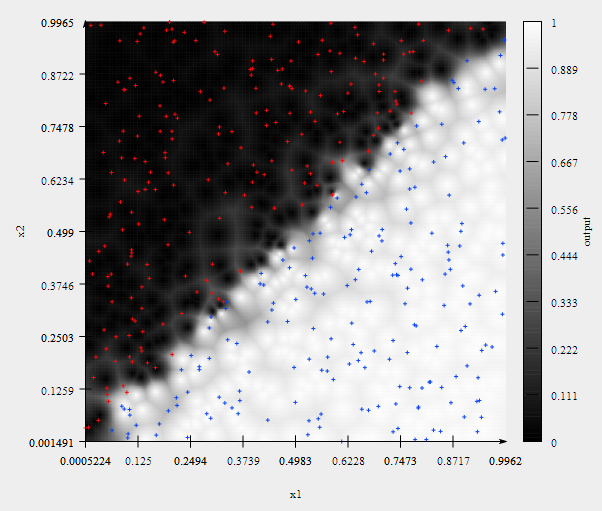
Ripr linear separation
Graphical representation of a temporal pattern
Coloring of correlation graph applied to segment visual features

TITARL machine learning interface

TITARL web interface

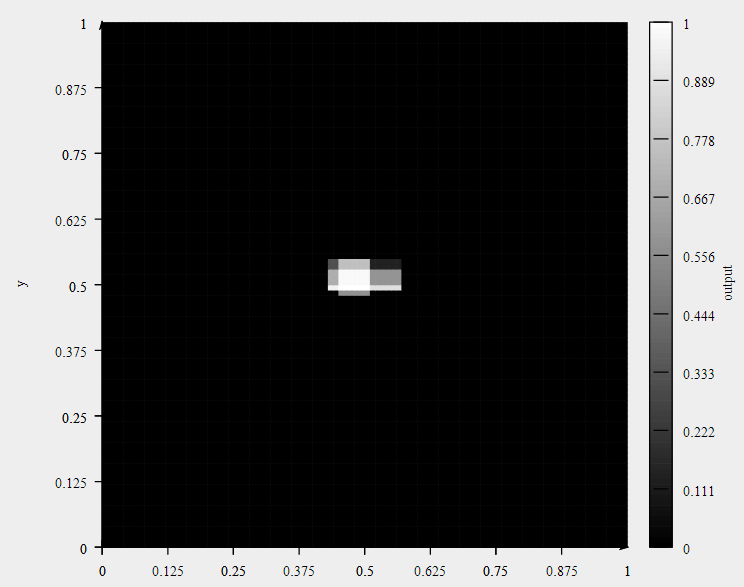
Instance of prediction of bathroom's use

Path of an unsupervised exploration in a virtual world

3d model of our virtual robot